プログラム制御でLチカ
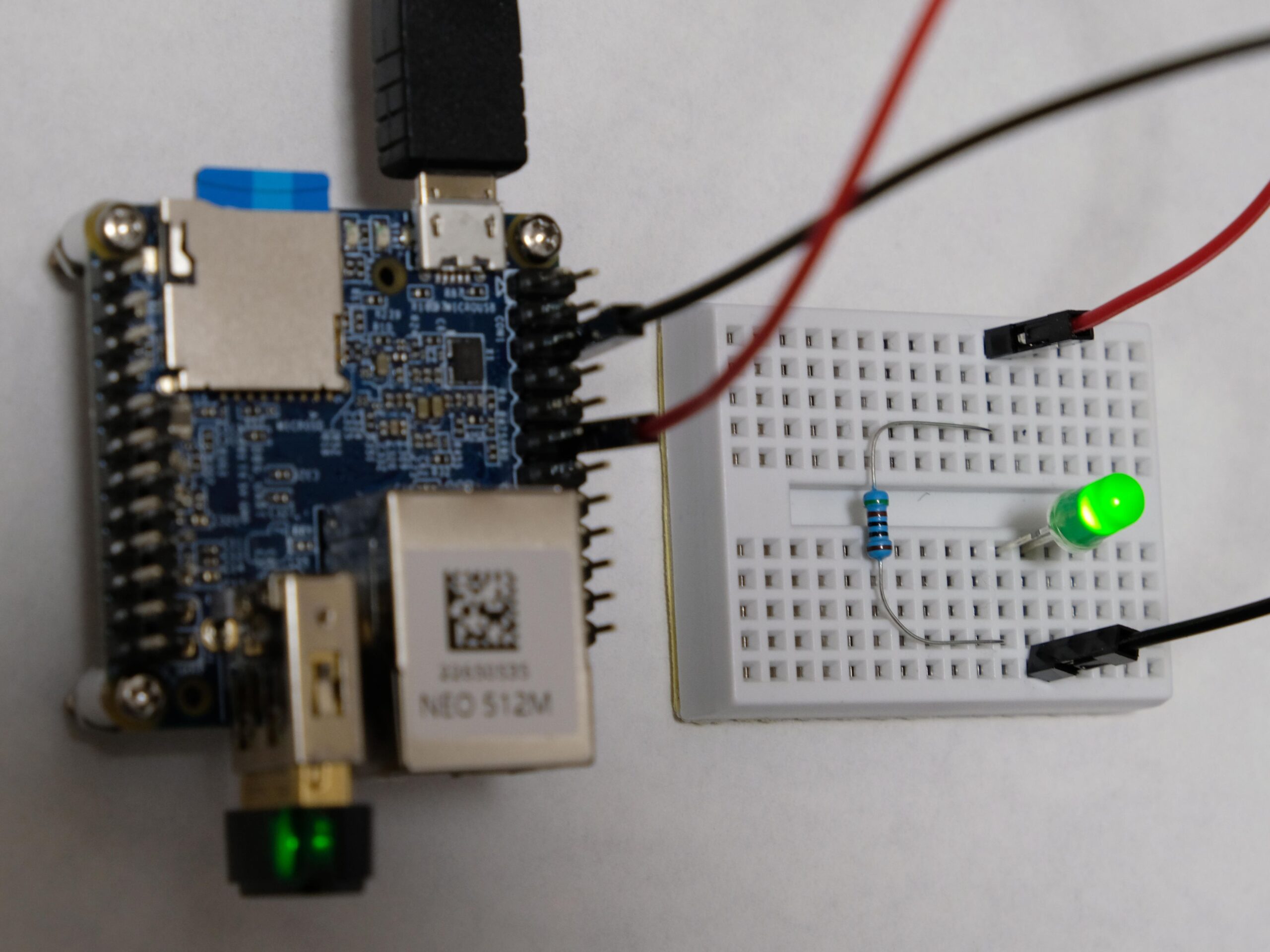
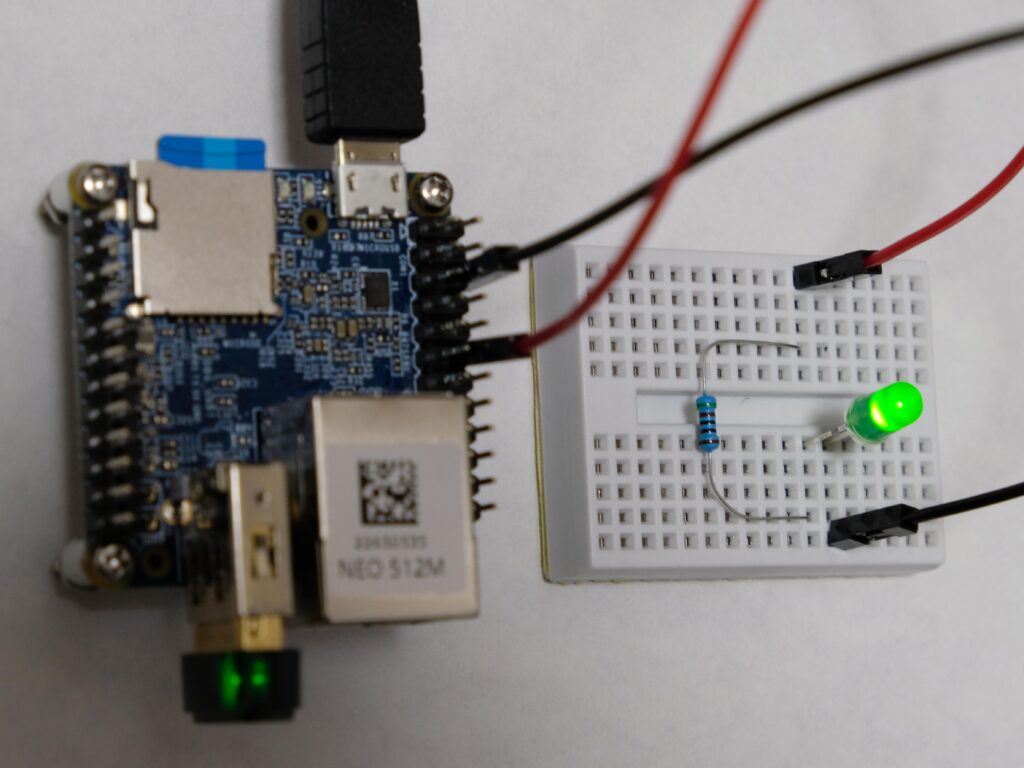
前回記事に引き続き、今回はC言語プログラム制御でLチカしてみたいと思います。前回までの記事は以下です。LED回路や接続については前回記事を参照ください。

【NanoPi NEO/Armbian】環境構築 ~Armbianインストール~起動まで~
組み込みLinux学習にオススメのSBC、NanoPi NEO組み込みLinux学習に適した環境といえば、なんといっても情報量の多いRaspberry Piですが、2023年4月現在で引き続き手困難が続いている様です。そんな中、個人的に組み...
osorkoma.net
2023.04.15

【NanoPi NEO/Armbian】LinuxでLチカしてみよう (コマンド制御編)
LinuxでLチカ今回は筆者が組み込みLinux学習に向いていると考えているNanoPi NEOを使います。環境構築については以下の記事で紹介しています。LED回路の作成などと大げさにいうほどのことではないのですが、まずはNanoPi NE...
osorkoma.net
2023.04.16
プログラム制御でLチカといっても基本的には前回紹介したコマンド制御内容をプログラムから実行する、というだけになります。
コマンド制御おさらい
前回記事より最終的なGPIO制御部分のみを抜き出すと以下になります。
$ su パスワード: # echo 6 > /sys/class/gpio/export # gpio6(PA6)有効化 # echo out > /sys/class/gpio/gpio6/direction # 出力ピン設定 # echo 1 > /sys/class/gpio/gpio6/value # 点灯 # echo 0 > /sys/class/gpio/gpio6/value # 消灯
前回記事では記載しませんでしたが、gpio6無効化は以下となります。
# echo 6 > /sys/class/gpio/unexport
シェルスクリプトで一連の制御実行をトライアル
C言語でのプログラミングの前に、コマンド制御手順をシェルスクリプト化して実行してみましょう。
$ vi led-flashing.sh
#!/bin/bash
if [ -d /sys/class/gpio/gpio6 ]
then
echo 6 > /sys/class/gpio/unexport
fi
echo 6 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio6/direction
for i in `seq 1 10`
do
echo 1 > /sys/class/gpio/gpio6/value
sleep 1
echo 0 > /sys/class/gpio/gpio6/value
sleep 1
done
echo 6 > /sys/class/gpio/unexport$ chmod +x led-flashing.sh $ sudo ./led-flashing.sh
2秒周期で点灯・消灯が10回行われたら成功です。
プログラミング
前述のシェルスクリプトでの制御内容を元に、忠実にC言語でプログラミングしてみます。
$ vi led-flashing.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <stdlib.h>
int main()
{
int fd = -1;
int ret;
int i;
struct stat st = { 0 };
// Unexport gpio6 if it exists.
ret = stat("/sys/class/gpio/gpio6", &st);
if(ret == 0) {
fd = open("/sys/class/gpio/unexport",O_WRONLY);
if(write(fd, "6", 1) != 1) {
perror("write-1");
exit(EXIT_FAILURE);
}
close(fd);
}
// Export gpio6.
fd = open("/sys/class/gpio/export",O_WRONLY);
if(write(fd, "6", 1) != 1) {
perror("write-2");
exit(EXIT_FAILURE);
}
close(fd);
// Set direction to out.
fd = open("/sys/class/gpio/gpio6/direction",O_WRONLY);
if(write(fd, "out", 3) != 3) {
perror("write-3");
exit(EXIT_FAILURE);
}
close(fd);
for(i = 0; i < 10; i++) {
// Turn on the LED.
fd = open("/sys/class/gpio/gpio6/value",O_WRONLY);
if(write(fd, "1", 1) != 1) {
perror("write-4");
exit(EXIT_FAILURE);
}
sleep(1);
// Turn off the LED.
fd = open("/sys/class/gpio/gpio6/value",O_WRONLY);
if(write(fd, "0", 1) != 1) {
perror("write-5");
exit(EXIT_FAILURE);
}
sleep(1);
}
// Unexport gpio6.
fd = open("/sys/class/gpio/unexport",O_WRONLY);
if(write(fd, "6", 1) != 1) {
perror("write-1");
exit(EXIT_FAILURE);
}
close(fd);
exit(EXIT_SUCCESS);
}
コンパイルして実行します。
$ gcc led-flashing.c $ sudo ./a.out
シェルスクリプトでの制御時同様に2秒周期で点灯・消灯が10回行われたら成功です。
今回はプログラムの実行も特権で行いましたが、別途アクセス権を適切に設定することでuserにて実行することも可能です。この辺りの話は別の機会にでもできればと思っています。
次回予告
ハードウェアPWMを使ってLEDの明るさを制御してみようかと思います。
今回の記事で使用した機材紹介

Xsdjasd NanoPi NEO用開発ボード + ヒートシンク + メタルケースキット Allwinner H3 クアッドコア 512MB RAM Openwrt/LEDE コンプリート マシン
¥4,220 (2025年10月24日 09:29 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)型式:NEO V1.4 OS サポート:FriendlyCore (UbuntuCore-16.04 に基づく);OpenWrt 18.06;Armbian;DietPi;Lakka; カーネルバージョン:Linux-4.4-;U-boot-2017.11 PCB:6層

Friendly NanoPi NEO Core2 Quanzhi Core H5 Quad Core A53 コアボード Ubuntuシステムに対応 (ヒートシンク付きコアボード)
¥6,674 (2025年10月24日 09:29 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)メモリ:512MB DDR3。 パッケージ:1個* (コアボード+ヒートシンク)。

Pasotim 3X NanoPi NEO用開発ボード + ヒートシンク + メタルケースキット Allwinner H3 クアッドコア 512MB RAM Openwrt/LEDE コンプリート マシン
¥11,486 (2025年10月24日 09:29 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)カーネルバージョン:Linux-4.4-;U-boot-2017.11 型式:NEO V1.4 OS サポート:FriendlyCore (UbuntuCore-16.04 に基づく);OpenWrt 18.06;Armbian;DietPi;Lakka; PCB:6層

KIOXIA(キオクシア) 旧東芝メモリ microSD 64GB UHS-I Class10 (最大読出速度100MB/s) Nintendo Switch動作確認済 国内サポート正規品 メーカー保証5年 KLMEA064G
¥740 (2025年10月24日 06:19 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)UHS-I、UHSスピードクラス1、SDスピードクラス10 最大読出速度:100MB/s Nintendo Switch動作確認済 *Nintendo Switch 2は非対応です。 保証期間:製品お買い上げ日より5年間 著作権保護機能(CPRM)非対応 本製品は自社国内工場生産のフラッシュメモリを搭載しております。製品の組み立て地は国内または海外があり、原産地は現品またはパッケージでご確認できます。
Auto Amazon Links: プロダクトが見つかりません。
Auto Amazon Links: プロダクトが見つかりません。
Auto Amazon Links: プロダクトが見つかりません。
Auto Amazon Links: プロダクトが見つかりません。
Auto Amazon Links: プロダクトが見つかりません。

コメント